In order to give it some heft, it has an empty cavity in the front of it accessible via a small 3D printed threaded plug. I filled it with cheap BBs. Now it doesn’t slide around and feels similar to its commercially produced neighbor.
Hey, all. I’m open sourcing my small competitive robot from last year, YellowBot_02, as well as a general-purpose chassis I designed based on it. All are shared as OnShape links (a web-based CAD that works like SolidWorks); you can export STLs from there or fork it and design further. The chassis is covered in a grid of 3mm holes at a 6mm distance; this makes it easy to design accessories in whatever CAD you like and attach with #6 or M3 screws and nuts (or even just zipties).
Last year’s MiniFRC robot, YellowBot_02, was discussed on this blog here. The CAD for it is available here. This CAD includes a mount for the Alfredo NoU and a battery (9V or 6xAA pack), as well a servo mechanism specific to that year’s game. Works with standard yellow gearmotors — they ziptie into the chassis.
Here’s a general purpose chassis I developed from that: ScienceBot. Same hole pattern, but in more places, and no big name on the back. I’m using this design for my undergraduate research students, too. Includes vertical mounts for an Arduino Uno plus Raspberry Pi (the latter not relevant to MiniFRC), a 3×18650 battery pack and 5V regulator (neither relevant to MiniFRC), and three MaxBotics ultrasonic sensors (probably not relevant to MiniFRC). Compatible with all the same mounts and motors as the YellowBot_02 chassis above.
A long time ago I posted YellowBot, a little robot built in one day. I am now ready to introduce YellowBot_02.
YellowBot_02 is a robot designed to compete in MiniFRC 2019, a quarter-scale version of the FIRST Robotics Competition hosted by the TerrorBytes (FRC team 4561). Design based on the full-size 2019 FRC robot by the RoboGladiators (FRC team 6426). The competition this robot was designed for is a 1/4-scale version of the FRC 2019 game, Deep Space. This particular bot is designed to transport “cargo” (2.25″ plastic ball pit balls) into the “cargo ship” (an elevated depository).
Below is a video of this bot competing in MiniFRC. If you want to see more MiniFRC (including more of this bot), this playlist has many of the matches.
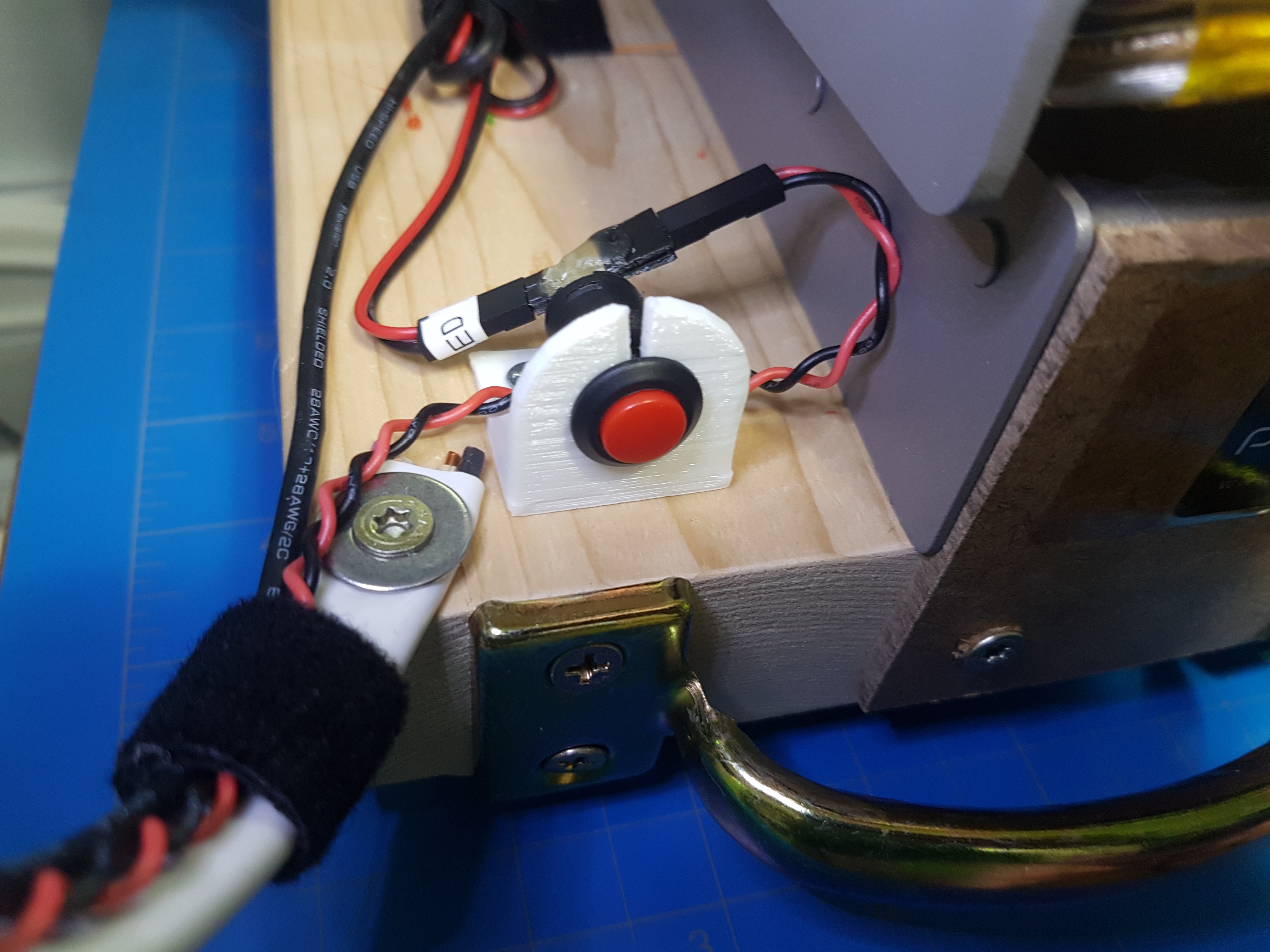
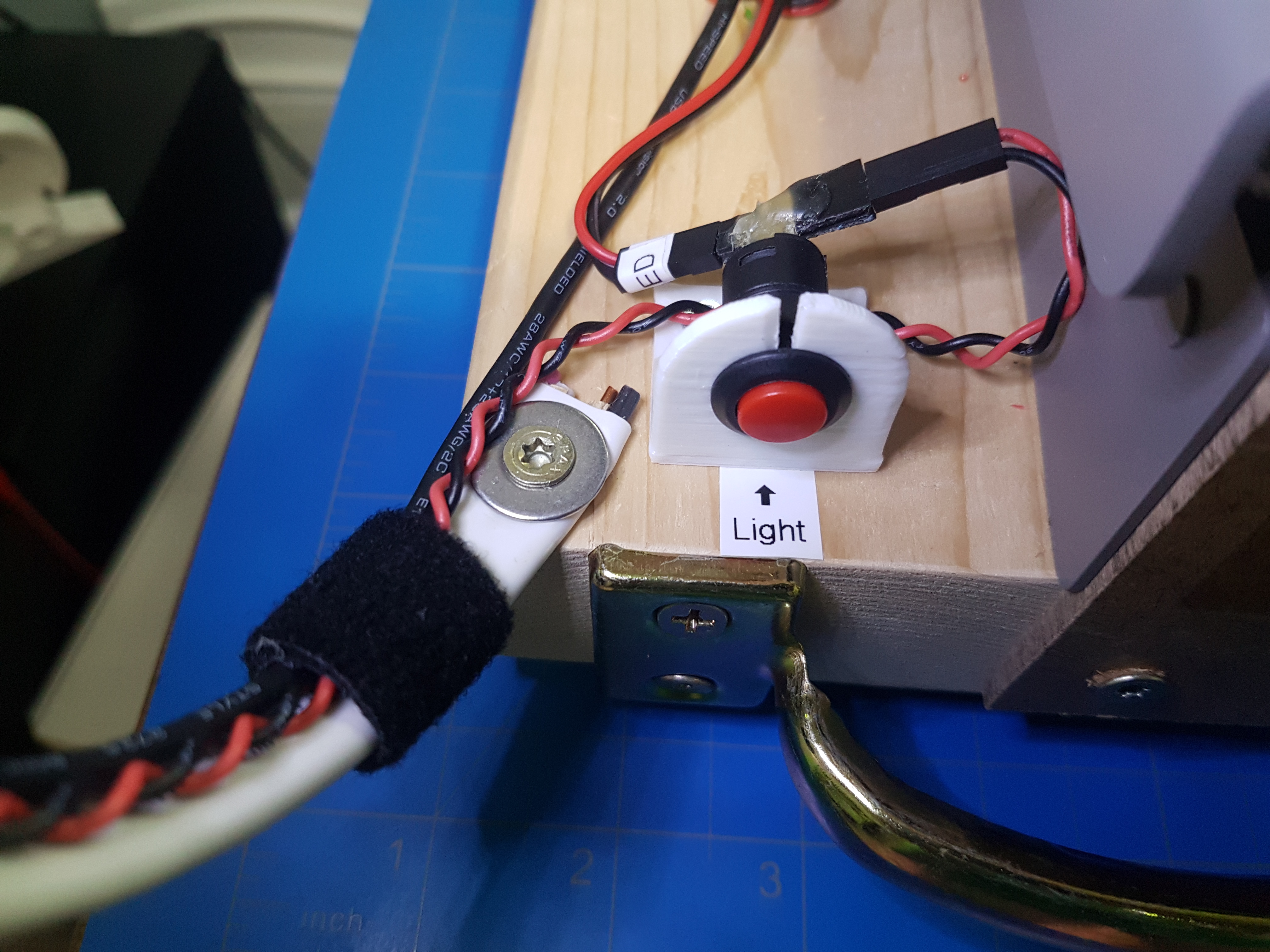
I needed a switch to control something that plugs in with a simple 2-pin Dupont cable. I thought about making a dongle cable or board for the hookup, but then I had an idea.
Boom, solved. Pics of construction and deployment into a 3D printed bracket:
After seeing this video, I was inspired to hunt down and purchase some early-model LEDs. It turns out you can get Soviet-era gold-plated LEDs from the 1970s on eBay, so I grabbed some of these and made a little thing to show them off.
The LEDs came from a seller in the Czech Republic and arrived via registered mail (the kind you have to go to your post office to sign for). The actual LEDs are gold plated, and you can see the actual junction clearly inside the lens.
I put two of them into a breadboard with an ATtiny85 programmed in Arduino to do a simple alternating blink pattern. I designed a 3D-printed display to hold it, spliced some USB to power it, and made a little label to explain what the thing was, and now I have a neat little thing to put on the shelf.
I had some new ideas on generating pictures based on Z-order curves. For speed this time, I wrote some truly horrific but decently fast C code to render stuff. I also re-did some of my earlier Hibert curve stuff in C.
Pictures below. They look best zoomed all the way in, and the jumbo ones make good wallpapers if set to ‘center’ (no scaling), even on big multi-monitor setups.
I did some experiments with graphics, and what I was trying to do didn’t really work, but I made some neat wallpapers as a side-effect. All but the first are 3840×2160 (4k).
I do in-house backups for my data, but the system that eats the data now is an all-in-one Intel Atom PC with a dying fan, and I don’t really trust it. Luckily we’re in the future, so fanless ARM-based computers are everywhere, so I built a little backup machine out of one. Details after the break.